'/%3e%3c/svg%3e) 发布
发布 ;}.c{fill:%233f3f3f;}%3c/style%3e%3cclipPath%20id='a'%3e%3crect%20class='a'%20width='24'%20height='24'%20transform='translate(0%20-0.256)'/%3e%3c/clipPath%3e%3c/defs%3e%3cg%20transform='translate(0%200.256)'%3e%3cg%20class='b'%3e%3cpath%20class='c'%20d='M12.938,13.58a.745.745,0,0,1-.328-.076L4.549,9.523a.741.741,0,0,1,0-1.33L12.61,4.212a.74.74,0,0,1,.657,0l8.061,3.981a.741.741,0,0,1,0,1.33L13.267,13.5a.741.741,0,0,1-.329.076M6.553,8.858l6.385,3.153,6.386-3.153L12.938,5.705Z'%20transform='translate(-1.067%20-1.067)'/%3e%3cpath%20class='c'%20d='M12.939,20.964a.729.729,0,0,1-.328-.077l-8.062-3.98a.742.742,0,1,1,.657-1.33l7.733,3.818,7.733-3.818a.742.742,0,1,1,.657,1.33l-8.062,3.98a.729.729,0,0,1-.328.077'%20transform='translate(-1.067%20-3.999)'/%3e%3cpath%20class='c'%20d='M12.939,26.964a.729.729,0,0,1-.328-.077l-8.062-3.98a.742.742,0,1,1,.657-1.33l7.733,3.818,7.733-3.818a.742.742,0,1,1,.657,1.33l-8.062,3.98a.729.729,0,0,1-.328.077'%20transform='translate(-1.067%20-5.547)'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
;}.c{fill:%233f3f3f;}%3c/style%3e%3cclipPath%20id='a'%3e%3crect%20class='a'%20width='24'%20height='24'%20transform='translate(0%200.225)'/%3e%3c/clipPath%3e%3c/defs%3e%3cg%20transform='translate(0%20-0.225)'%3e%3cg%20class='b'%3e%3cpath%20class='c'%20d='M21.648,9.056a.754.754,0,0,0-.215-.535l-5.3-5.3a.752.752,0,0,0-.535-.215V3H7.375A2.377,2.377,0,0,0,5,5.376V20.307a2.377,2.377,0,0,0,2.375,2.376h11.9a2.378,2.378,0,0,0,2.376-2.376V9.056ZM16.355,5.584,19.07,8.3H16.923a.569.569,0,0,1-.568-.568Zm2.924,15.584H7.375a.862.862,0,0,1-.861-.861V5.376a.862.862,0,0,1,.861-.861h7.466V7.731a2.084,2.084,0,0,0,2.082,2.082H20.14V20.307a.863.863,0,0,1-.861.861'%20transform='translate(-1.215%20-0.729)'/%3e%3cpath%20class='c'%20d='M10.757,15.514H15.3A.757.757,0,0,0,15.3,14H10.757a.757.757,0,0,0,0,1.514'%20transform='translate(-2.43%20-3.402)'/%3e%3cpath%20class='c'%20d='M18.327,20h-7.57a.757.757,0,0,0,0,1.514h7.57a.757.757,0,0,0,0-1.514'%20transform='translate(-2.43%20-4.86)'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
机器人
机器人相关开源硬件项目:
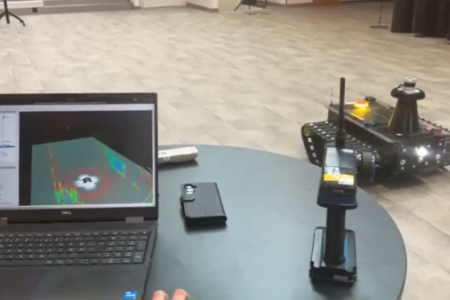
AI.R 极地机器人:基于 ROS2 的寒地感知、导航与控制栈
AI.R(Arctic AI & Robotics) 是一个面向寒地环境的模块化 ROS2 自主移动机器人开发平台。该平台采用分层架构设计:底层基于 ESP32 微控制器实现电机驱动与低电平控制,上层基于 NVIDIA Jetson 硬件运行 ROS2 系统,集成多传感器感知单元(激光雷达、双目相机、热成像相机、GNSS 模块、超声波阵列)。
 oshw_hqzl0170
oshw_hqzl0170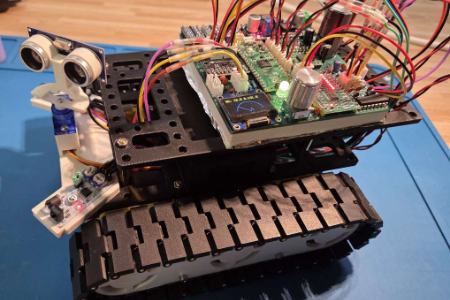
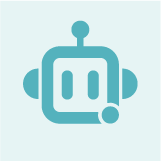
基于 Rust 语言开发的履带式移动机器人
这是一个基于 Rust 语言开发的履带式移动机器人,兼具自主导航与远程控制能力,是面向嵌入式 Rust 与机器人开发的学习项目。
oshw_hqzl1139
Asimov v1 开源人形机器人
Asimov v1 是由 Menlo Research 推出的完全开源人形机器人项目,目标是让普通开发者、研究人员也能低成本搭建、训练和定制双足机器人,打破行业大厂的封闭生态。
oshw_hqzl0390
ZeroBug 开源六足机器人
ZeroBug 是由开发者“CoretechR”打造的"开源 DIY 微型六足机器人项目",它采用分层控制架构,以低成本硬件实现了流畅、高精度的六足运动控制,是嵌入式开发、机器人学与 3D 打印结合的经典教学与实践项目。
oshw_hqzl0463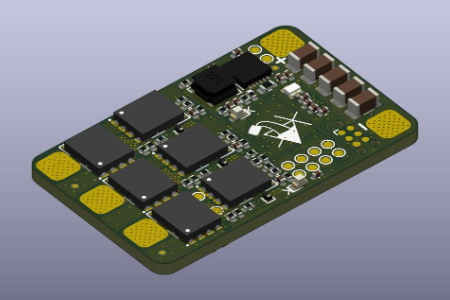
Kururugi-ESC:面向 FPV 与机器人的 FOC / 六步控制开源电调器
这是一款面向 FPV 无人机、机器人应用的高性能、无传感器电调器(ESC),主打高频率开关、精准电机控制与完全开源透明。
oshw_hqzl0155
成本不到120的轮足otto机器人
otto 机器人是一个开源的机器人平台,具有多种动作能力和互动功能。本项目基于 Tuya T5实现了ninja otto 机器人的控制系统,并接入Tuya AI。参考了小鹏的电路图,故保留原创~
 TuyaOpen51036
TuyaOpen51036
;}.c{fill:%23555;}%3c/style%3e%3cclipPath%20id='a'%3e%3crect%20class='a'%20width='18'%20height='18'%20transform='translate(1543%202144)'/%3e%3c/clipPath%3e%3c/defs%3e%3cg%20class='b'%20transform='translate(-1543%20-2144)'%3e%3cpath%20class='c'%20d='M182.144,108.918a.7.7,0,1,1-1.407,0V98.083l-.033.027-.054.05-5.045,5.045a.7.7,0,0,1-1.041-.945l.046-.05,5.045-5.045a2.508,2.508,0,0,1,3.477-.031l.075.072,4.988,5.022a.7.7,0,0,1-.949,1.038l-.05-.046L182.21,98.2l-.066-.061Zm5.394-15.827a.7.7,0,1,1,0,1.407h-12.2a.7.7,0,1,1,0-1.407Z'%20transform='translate(1370.601%202051.909)'/%3e%3c/g%3e%3c/svg%3e "回到顶部")