



'/%3e%3c/svg%3e) 发布
发布 ;}.c{fill:%233f3f3f;}%3c/style%3e%3cclipPath%20id='a'%3e%3crect%20class='a'%20width='24'%20height='24'%20transform='translate(0%20-0.256)'/%3e%3c/clipPath%3e%3c/defs%3e%3cg%20transform='translate(0%200.256)'%3e%3cg%20class='b'%3e%3cpath%20class='c'%20d='M12.938,13.58a.745.745,0,0,1-.328-.076L4.549,9.523a.741.741,0,0,1,0-1.33L12.61,4.212a.74.74,0,0,1,.657,0l8.061,3.981a.741.741,0,0,1,0,1.33L13.267,13.5a.741.741,0,0,1-.329.076M6.553,8.858l6.385,3.153,6.386-3.153L12.938,5.705Z'%20transform='translate(-1.067%20-1.067)'/%3e%3cpath%20class='c'%20d='M12.939,20.964a.729.729,0,0,1-.328-.077l-8.062-3.98a.742.742,0,1,1,.657-1.33l7.733,3.818,7.733-3.818a.742.742,0,1,1,.657,1.33l-8.062,3.98a.729.729,0,0,1-.328.077'%20transform='translate(-1.067%20-3.999)'/%3e%3cpath%20class='c'%20d='M12.939,26.964a.729.729,0,0,1-.328-.077l-8.062-3.98a.742.742,0,1,1,.657-1.33l7.733,3.818,7.733-3.818a.742.742,0,1,1,.657,1.33l-8.062,3.98a.729.729,0,0,1-.328.077'%20transform='translate(-1.067%20-5.547)'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
;}.c{fill:%233f3f3f;}%3c/style%3e%3cclipPath%20id='a'%3e%3crect%20class='a'%20width='24'%20height='24'%20transform='translate(0%200.225)'/%3e%3c/clipPath%3e%3c/defs%3e%3cg%20transform='translate(0%20-0.225)'%3e%3cg%20class='b'%3e%3cpath%20class='c'%20d='M21.648,9.056a.754.754,0,0,0-.215-.535l-5.3-5.3a.752.752,0,0,0-.535-.215V3H7.375A2.377,2.377,0,0,0,5,5.376V20.307a2.377,2.377,0,0,0,2.375,2.376h11.9a2.378,2.378,0,0,0,2.376-2.376V9.056ZM16.355,5.584,19.07,8.3H16.923a.569.569,0,0,1-.568-.568Zm2.924,15.584H7.375a.862.862,0,0,1-.861-.861V5.376a.862.862,0,0,1,.861-.861h7.466V7.731a2.084,2.084,0,0,0,2.082,2.082H20.14V20.307a.863.863,0,0,1-.861.861'%20transform='translate(-1.215%20-0.729)'/%3e%3cpath%20class='c'%20d='M10.757,15.514H15.3A.757.757,0,0,0,15.3,14H10.757a.757.757,0,0,0,0,1.514'%20transform='translate(-2.43%20-3.402)'/%3e%3cpath%20class='c'%20d='M18.327,20h-7.57a.757.757,0,0,0,0,1.514h7.57a.757.757,0,0,0,0-1.514'%20transform='translate(-2.43%20-4.86)'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
;}.b,.c{fill:%233f96f0;stroke:%233f96f0;}.b{stroke-width:0.3px;}.c{stroke-width:0.2px;}%3c/style%3e%3c/defs%3e%3cg%20transform='translate(-2%20-2)'%3e%3crect%20class='a'%20width='16'%20height='16'%20transform='translate(2%202)'/%3e%3cg%20transform='translate(2%203)'%3e%3cpath%20class='b'%20d='M13.643,31H4.357c-.2,0-.357.224-.357.5s.16.5.357.5h9.286c.2,0,.357-.224.357-.5s-.16-.5-.357-.5'%20transform='translate(-1%20-18)'/%3e%3cpath%20class='c'%20d='M11.583,14.589l4.392-4.409a.415.415,0,0,0-.584-.586L12,13V4.416a.414.414,0,1,0-.828,0V13l-3.39-3.4a.415.415,0,1,0-.584.586Z'%20transform='translate(-3.562%20-3)'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
;}.c{fill:%23dbdbdb;}.d{fill:none;stroke:%23333;stroke-linecap:round;stroke-linejoin:round;}%3c/style%3e%3cclipPath%20id='a'%3e%3crect%20class='a'%20width='22'%20height='22'/%3e%3c/clipPath%3e%3c/defs%3e%3cg%20class='b'%3e%3cg%20transform='translate(1.375%202.251)'%3e%3cpath%20class='c'%20d='M7.563,9.224A20.661,20.661,0,0,1,18.8,8.265l-7.088,7.329-.922-.373-.023-3.312-1.389-.741-2.555.389-3.56,2.989-2,1.7s-.1-4.771,6.3-7.021'%20transform='translate(-0.5%200.249)'/%3e%3cpath%20class='d'%20d='M12.174.745l7.332,7.332a.834.834,0,0,1-.017,1.195L12.157,16.2a.833.833,0,0,1-1.405-.606V12.679a.844.844,0,0,0-.931-.832A11.108,11.108,0,0,0,2,16.74a.834.834,0,0,1-1.5-.576C1.132,9.59,3.786,5.4,9.942,5.066a.841.841,0,0,0,.81-.829v-2.9A.833.833,0,0,1,12.174.745Z'%20transform='translate(-0.5%20-0.5)'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
AI.R(Arctic AI & Robotics) 是一个面向寒地环境的模块化 ROS2 自主移动机器人开发平台。由芬兰拉普兰应用科学大学(Lapin AMK)主导开发,是一个为极地 / 寒地场景优化的机器人开发框架,目标是降低自主移动机器人的开发与部署门槛,尤其适配拉普兰地区的雪地、低温等特殊环境。
该平台采用分层架构设计:底层基于 ESP32 微控制器实现电机驱动与低电平控制,上层基于 NVIDIA Jetson 硬件运行 ROS2 系统,集成多传感器感知单元(激光雷达、双目相机、热成像相机、GNSS 模块、超声波阵列),并通过 ROS2 TF 坐标系管理与 Navigation 2 实现统一的空间坐标转换、路径规划与动态避障功能。平台采用 Docker 容器化构建方案,确保开发环境的一致性与可复现性,为极地、寒地等特殊环境下的自主移动机器人开发提供了完整的软硬件一体化解决方案。
技术架构与核心模块
模块 | 关键信息 |
|---|---|
核心框架 | ROS2(Robot Operating System 2),使用 Navigation 2 实现路径规划与避障 |
感知系统 | 集成激光雷达(Lidar)、双目相机、热成像相机、GNSS 模块、超声波阵列 |
控制层级 | 底层 ESP32 微控制器固件 + 上层 NVIDIA Jetson 主控的高层控制 |
工程化方案 | Docker 容器化构建,确保开发 / 部署环境的一致性 |
系统设计亮点
ROS2 坐标变换(TF)树:通过结构化的 TF 坐标系管理,实现传感器、执行器间空间关系的统一,确保数据在同一坐标系下被解读,提升感知与控制的鲁棒性。
节点与话题架构:采用 ROS2 发布 - 订阅模型,模块化拆分定位、导航、感知、控制功能,各节点专注单一任务,便于调试与扩展。
实时可视化调试:通过
rqt_graph工具展示节点与话题的实时通信链路,可直观验证数据流向是否正常。
项目背景与应用场景
项目由欧盟与拉普兰地区联合资助,聚焦寒地机器人技术的产业落地,例如雪地维护、极地巡检等场景。
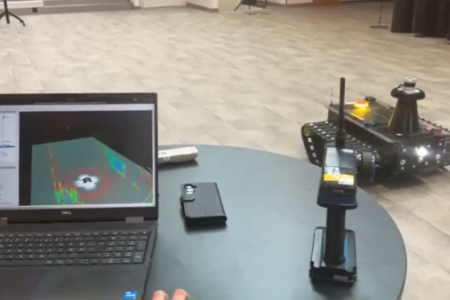
目前已在 Snower 机器人平台上完成测试,支持自主路径导航与动态障碍物规避。
License
MIT license
;}.c{fill:%23555;}%3c/style%3e%3cclipPath%20id='a'%3e%3crect%20class='a'%20width='18'%20height='18'%20transform='translate(1543%202144)'/%3e%3c/clipPath%3e%3c/defs%3e%3cg%20class='b'%20transform='translate(-1543%20-2144)'%3e%3cpath%20class='c'%20d='M182.144,108.918a.7.7,0,1,1-1.407,0V98.083l-.033.027-.054.05-5.045,5.045a.7.7,0,0,1-1.041-.945l.046-.05,5.045-5.045a2.508,2.508,0,0,1,3.477-.031l.075.072,4.988,5.022a.7.7,0,0,1-.949,1.038l-.05-.046L182.21,98.2l-.066-.061Zm5.394-15.827a.7.7,0,1,1,0,1.407h-12.2a.7.7,0,1,1,0-1.407Z'%20transform='translate(1370.601%202051.909)'/%3e%3c/g%3e%3c/svg%3e "回到顶部")