



'/%3e%3c/svg%3e) 发布
发布 ;}.c{fill:%233f3f3f;}%3c/style%3e%3cclipPath%20id='a'%3e%3crect%20class='a'%20width='24'%20height='24'%20transform='translate(0%20-0.256)'/%3e%3c/clipPath%3e%3c/defs%3e%3cg%20transform='translate(0%200.256)'%3e%3cg%20class='b'%3e%3cpath%20class='c'%20d='M12.938,13.58a.745.745,0,0,1-.328-.076L4.549,9.523a.741.741,0,0,1,0-1.33L12.61,4.212a.74.74,0,0,1,.657,0l8.061,3.981a.741.741,0,0,1,0,1.33L13.267,13.5a.741.741,0,0,1-.329.076M6.553,8.858l6.385,3.153,6.386-3.153L12.938,5.705Z'%20transform='translate(-1.067%20-1.067)'/%3e%3cpath%20class='c'%20d='M12.939,20.964a.729.729,0,0,1-.328-.077l-8.062-3.98a.742.742,0,1,1,.657-1.33l7.733,3.818,7.733-3.818a.742.742,0,1,1,.657,1.33l-8.062,3.98a.729.729,0,0,1-.328.077'%20transform='translate(-1.067%20-3.999)'/%3e%3cpath%20class='c'%20d='M12.939,26.964a.729.729,0,0,1-.328-.077l-8.062-3.98a.742.742,0,1,1,.657-1.33l7.733,3.818,7.733-3.818a.742.742,0,1,1,.657,1.33l-8.062,3.98a.729.729,0,0,1-.328.077'%20transform='translate(-1.067%20-5.547)'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
;}.c{fill:%233f3f3f;}%3c/style%3e%3cclipPath%20id='a'%3e%3crect%20class='a'%20width='24'%20height='24'%20transform='translate(0%200.225)'/%3e%3c/clipPath%3e%3c/defs%3e%3cg%20transform='translate(0%20-0.225)'%3e%3cg%20class='b'%3e%3cpath%20class='c'%20d='M21.648,9.056a.754.754,0,0,0-.215-.535l-5.3-5.3a.752.752,0,0,0-.535-.215V3H7.375A2.377,2.377,0,0,0,5,5.376V20.307a2.377,2.377,0,0,0,2.375,2.376h11.9a2.378,2.378,0,0,0,2.376-2.376V9.056ZM16.355,5.584,19.07,8.3H16.923a.569.569,0,0,1-.568-.568Zm2.924,15.584H7.375a.862.862,0,0,1-.861-.861V5.376a.862.862,0,0,1,.861-.861h7.466V7.731a2.084,2.084,0,0,0,2.082,2.082H20.14V20.307a.863.863,0,0,1-.861.861'%20transform='translate(-1.215%20-0.729)'/%3e%3cpath%20class='c'%20d='M10.757,15.514H15.3A.757.757,0,0,0,15.3,14H10.757a.757.757,0,0,0,0,1.514'%20transform='translate(-2.43%20-3.402)'/%3e%3cpath%20class='c'%20d='M18.327,20h-7.57a.757.757,0,0,0,0,1.514h7.57a.757.757,0,0,0,0-1.514'%20transform='translate(-2.43%20-4.86)'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
;}.b,.c{fill:%233f96f0;stroke:%233f96f0;}.b{stroke-width:0.3px;}.c{stroke-width:0.2px;}%3c/style%3e%3c/defs%3e%3cg%20transform='translate(-2%20-2)'%3e%3crect%20class='a'%20width='16'%20height='16'%20transform='translate(2%202)'/%3e%3cg%20transform='translate(2%203)'%3e%3cpath%20class='b'%20d='M13.643,31H4.357c-.2,0-.357.224-.357.5s.16.5.357.5h9.286c.2,0,.357-.224.357-.5s-.16-.5-.357-.5'%20transform='translate(-1%20-18)'/%3e%3cpath%20class='c'%20d='M11.583,14.589l4.392-4.409a.415.415,0,0,0-.584-.586L12,13V4.416a.414.414,0,1,0-.828,0V13l-3.39-3.4a.415.415,0,1,0-.584.586Z'%20transform='translate(-3.562%20-3)'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
;}.c{fill:%23dbdbdb;}.d{fill:none;stroke:%23333;stroke-linecap:round;stroke-linejoin:round;}%3c/style%3e%3cclipPath%20id='a'%3e%3crect%20class='a'%20width='22'%20height='22'/%3e%3c/clipPath%3e%3c/defs%3e%3cg%20class='b'%3e%3cg%20transform='translate(1.375%202.251)'%3e%3cpath%20class='c'%20d='M7.563,9.224A20.661,20.661,0,0,1,18.8,8.265l-7.088,7.329-.922-.373-.023-3.312-1.389-.741-2.555.389-3.56,2.989-2,1.7s-.1-4.771,6.3-7.021'%20transform='translate(-0.5%200.249)'/%3e%3cpath%20class='d'%20d='M12.174.745l7.332,7.332a.834.834,0,0,1-.017,1.195L12.157,16.2a.833.833,0,0,1-1.405-.606V12.679a.844.844,0,0,0-.931-.832A11.108,11.108,0,0,0,2,16.74a.834.834,0,0,1-1.5-.576C1.132,9.59,3.786,5.4,9.942,5.066a.841.841,0,0,0,.81-.829v-2.9A.833.833,0,0,1,12.174.745Z'%20transform='translate(-0.5%20-0.5)'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
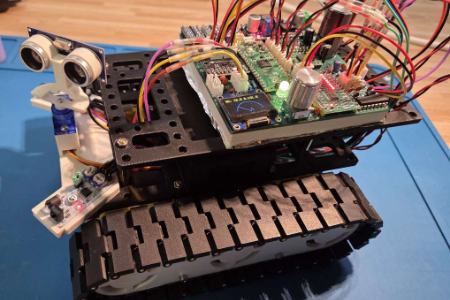
这是一个基于 Rust 语言开发的履带式移动机器人,兼具自主导航与远程控制能力,是面向嵌入式 Rust 与机器人开发的学习项目。
项目核心概况
开发背景
最初是作者为孩子打造的入门机器人项目,现已迭代至 v2 版本,目标是实现无 ROS 依赖的轻量自主导航方案。
核心开发语言为 Rust,采用 Embassy 异步框架,主打 “纯嵌入式、低资源占用” 的实现思路。
核心功能目标
基础远程控制(红外 / 遥控)
超声波传感器避障(基础版)
基于 IMU(ICM20948)+ 超声波的空间感知与高级避障
摄像头跟随目标模式
自主探索模式(随机搜索目标)
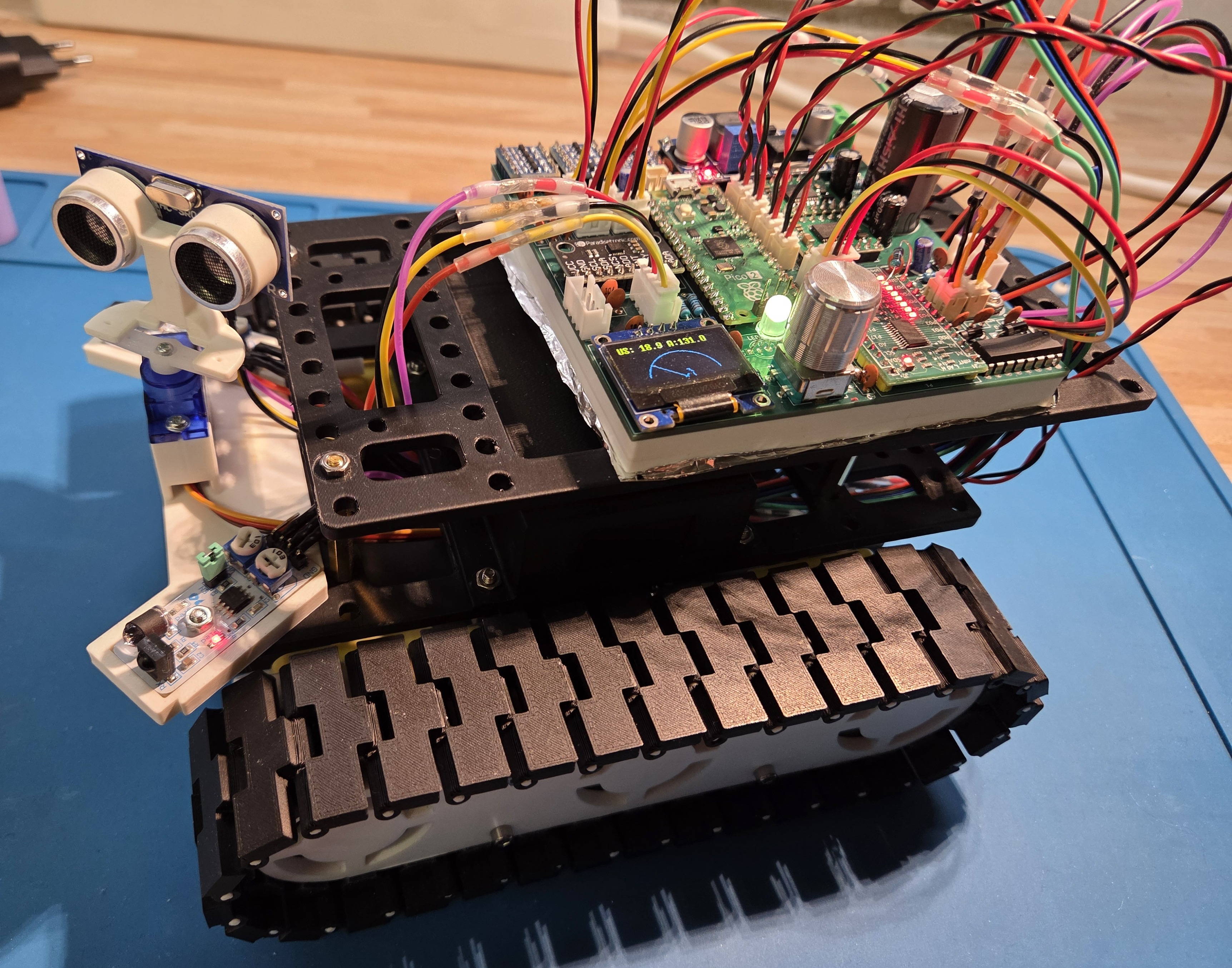
硬件架构(v2 版本)
主控与核心板
主控:Raspberry Pi Pico 2(RP2350),双核 Cortex-M33,150MHz 时钟
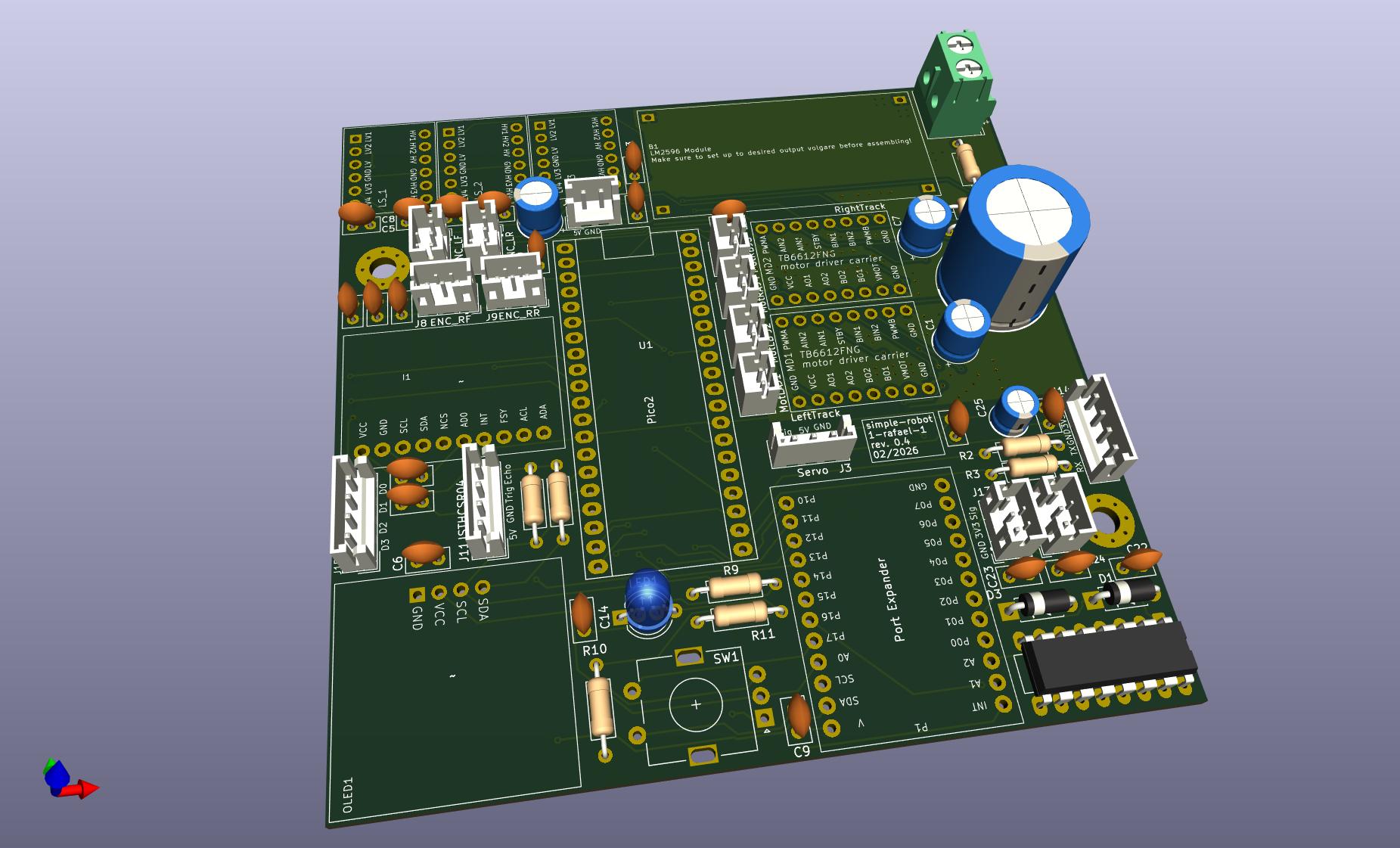
PCB:作者自研的定制底板,集成电源管理、电机驱动、传感器接口
传感器系统
模块 | 型号 / 规格 | 用途 |
|---|---|---|
9 轴 IMU | ICM-20948(TDK InvenSense) | 姿态解算、运动补偿 |
超声波传感器 | HC-SR04(×2) | 前方 / 侧方障碍物检测 |
摄像头 | Grove Vision AI V2 | 目标识别与跟随 |
红外传感器 | 红外接收模块 | 遥控信号接收 |
动力与驱动
底盘:基于 Proto-Tank 履带式底盘(3D 打印 PLA 外壳)
电机驱动:TB6612FNG 双路电机驱动 ×2(控制左右履带)
电源:LM2596 DC-DC 降压模块,支持锂电池供电
软件设计亮点
代码架构
采用 任务 - 状态分离 的分层设计:
system模块:全局资源管理(时钟、电源、外设初始化)tasks模块:独立任务线程(电机控制、传感器采集、用户交互)
基于 Embassy 异步框架,实现无阻塞的传感器读取与电机控制,单核心即可驱动所有任务。
关键实现细节
为 HC-SR04 超声波传感器开发了 异步驱动,解决传统轮询方式的阻塞问题。
实现了基于移动中位数的传感器滤波算法,解决超声波在运动状态下的噪声问题。
开发了 ICM-20948 的 Rust 驱动,支持异步 I2C 操作与姿态数据输出。
设计与制造细节
电路与 PCB
作者提供了完整的 KiCad 工程文件(原理图与 PCB 版图),可直接打板制作。
采用模块化设计,将电源、驱动、传感器接口分区布局,减少信号干扰。
3D 打印部件
底盘、传感器支架、履带张紧结构等部件均提供 FreeCAD 源文件,支持用户自定义修改。
采用 PLA 材料打印,兼顾强度与打印难度,适合 hobby 场景制作。
开源与许可
项目采用多协议许可模式,不同组件适用不同许可证:
固件代码:MIT License
3D 打印部件:CC BY-SA 4.0
原理图与 PCB 设计:CC BY-SA 4.0
文档与说明:CC BY-SA 4.0
项目意义与延伸
这个项目是嵌入式 Rust 在机器人领域的优秀实践,证明了无需复杂的 ROS 生态,也能在低资源微控制器上实现实用的自主导航功能。同时,项目附带的驱动开发(HC-SR04、ICM-20948)也为 Rust 嵌入式开发者提供了可复用的组件。
;}.c{fill:%23555;}%3c/style%3e%3cclipPath%20id='a'%3e%3crect%20class='a'%20width='18'%20height='18'%20transform='translate(1543%202144)'/%3e%3c/clipPath%3e%3c/defs%3e%3cg%20class='b'%20transform='translate(-1543%20-2144)'%3e%3cpath%20class='c'%20d='M182.144,108.918a.7.7,0,1,1-1.407,0V98.083l-.033.027-.054.05-5.045,5.045a.7.7,0,0,1-1.041-.945l.046-.05,5.045-5.045a2.508,2.508,0,0,1,3.477-.031l.075.072,4.988,5.022a.7.7,0,0,1-.949,1.038l-.05-.046L182.21,98.2l-.066-.061Zm5.394-15.827a.7.7,0,1,1,0,1.407h-12.2a.7.7,0,1,1,0-1.407Z'%20transform='translate(1370.601%202051.909)'/%3e%3c/g%3e%3c/svg%3e "回到顶部")