



'/%3e%3c/svg%3e) 发布
发布 ;}.c{fill:%233f3f3f;}%3c/style%3e%3cclipPath%20id='a'%3e%3crect%20class='a'%20width='24'%20height='24'%20transform='translate(0%20-0.256)'/%3e%3c/clipPath%3e%3c/defs%3e%3cg%20transform='translate(0%200.256)'%3e%3cg%20class='b'%3e%3cpath%20class='c'%20d='M12.938,13.58a.745.745,0,0,1-.328-.076L4.549,9.523a.741.741,0,0,1,0-1.33L12.61,4.212a.74.74,0,0,1,.657,0l8.061,3.981a.741.741,0,0,1,0,1.33L13.267,13.5a.741.741,0,0,1-.329.076M6.553,8.858l6.385,3.153,6.386-3.153L12.938,5.705Z'%20transform='translate(-1.067%20-1.067)'/%3e%3cpath%20class='c'%20d='M12.939,20.964a.729.729,0,0,1-.328-.077l-8.062-3.98a.742.742,0,1,1,.657-1.33l7.733,3.818,7.733-3.818a.742.742,0,1,1,.657,1.33l-8.062,3.98a.729.729,0,0,1-.328.077'%20transform='translate(-1.067%20-3.999)'/%3e%3cpath%20class='c'%20d='M12.939,26.964a.729.729,0,0,1-.328-.077l-8.062-3.98a.742.742,0,1,1,.657-1.33l7.733,3.818,7.733-3.818a.742.742,0,1,1,.657,1.33l-8.062,3.98a.729.729,0,0,1-.328.077'%20transform='translate(-1.067%20-5.547)'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
;}.c{fill:%233f3f3f;}%3c/style%3e%3cclipPath%20id='a'%3e%3crect%20class='a'%20width='24'%20height='24'%20transform='translate(0%200.225)'/%3e%3c/clipPath%3e%3c/defs%3e%3cg%20transform='translate(0%20-0.225)'%3e%3cg%20class='b'%3e%3cpath%20class='c'%20d='M21.648,9.056a.754.754,0,0,0-.215-.535l-5.3-5.3a.752.752,0,0,0-.535-.215V3H7.375A2.377,2.377,0,0,0,5,5.376V20.307a2.377,2.377,0,0,0,2.375,2.376h11.9a2.378,2.378,0,0,0,2.376-2.376V9.056ZM16.355,5.584,19.07,8.3H16.923a.569.569,0,0,1-.568-.568Zm2.924,15.584H7.375a.862.862,0,0,1-.861-.861V5.376a.862.862,0,0,1,.861-.861h7.466V7.731a2.084,2.084,0,0,0,2.082,2.082H20.14V20.307a.863.863,0,0,1-.861.861'%20transform='translate(-1.215%20-0.729)'/%3e%3cpath%20class='c'%20d='M10.757,15.514H15.3A.757.757,0,0,0,15.3,14H10.757a.757.757,0,0,0,0,1.514'%20transform='translate(-2.43%20-3.402)'/%3e%3cpath%20class='c'%20d='M18.327,20h-7.57a.757.757,0,0,0,0,1.514h7.57a.757.757,0,0,0,0-1.514'%20transform='translate(-2.43%20-4.86)'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
;}.c{fill:%23bababa;}%3c/style%3e%3cclipPath%20id='a'%3e%3crect%20class='a'%20width='14'%20height='14'%20transform='translate(336%20411)'/%3e%3c/clipPath%3e%3c/defs%3e%3cg%20class='b'%20transform='translate(-336%20-411)'%3e%3cpath%20class='c'%20d='M70.34,76.84a6.5,6.5,0,1,1,6.5-6.5A6.507,6.507,0,0,1,70.34,76.84Zm0-12.235a5.735,5.735,0,1,0,5.735,5.735A5.742,5.742,0,0,0,70.34,64.6Zm1.485,7.745-.036-.052-.113-.05h-.052a.78.78,0,0,0-.334.118l-.332.224a1.464,1.464,0,0,1-.3.144,2.348,2.348,0,0,1-.358.1.946.946,0,0,1-.227.023c-.1-.012-.132-.053-.143-.068a.355.355,0,0,1-.031-.228,4.391,4.391,0,0,1,.129-.622q.107-.4.207-.693t.236-.614a4.77,4.77,0,0,1,.213-.456,1.546,1.546,0,0,1,.214-.28c.089-.1.3-.326.178-.546a.407.407,0,0,0-.361-.2.912.912,0,0,0-.3.058,1.714,1.714,0,0,0-.22.088,2.154,2.154,0,0,0-.281.214,1.076,1.076,0,0,0-.291.29.861.861,0,0,0-.069.336,2.289,2.289,0,0,1-.139.519l-.295.943-.237.651a1.71,1.71,0,0,0-.071.588,1.659,1.659,0,0,0,.1.467.984.984,0,0,0,.245.379.745.745,0,0,0,.405.192.781.781,0,0,0,.138.012,1.606,1.606,0,0,0,.45-.078,4.223,4.223,0,0,0,.552-.2,2.824,2.824,0,0,0,.428-.238q.179-.123.369-.265a.867.867,0,0,0,.315-.383A.389.389,0,0,0,71.825,72.349Zm-1.9-4.013a.472.472,0,0,0,.284.105.918.918,0,0,0,.553-.239c.235-.173.36-.31.373-.413a1.115,1.115,0,0,0-.1-.478A1.071,1.071,0,0,0,70.8,66.9a.446.446,0,0,0-.259-.1.638.638,0,0,0-.518.263,1.821,1.821,0,0,0-.294.438.753.753,0,0,0-.064.234.9.9,0,0,0,.263.6Z'%20transform='translate(273.16%20348.16)'/%3e%3c/g%3e%3c/svg%3e) 该项目存在多块PCBA,可切换查看
该项目存在多块PCBA,可切换查看 ;}.b,.c{fill:%233f96f0;stroke:%233f96f0;}.b{stroke-width:0.3px;}.c{stroke-width:0.2px;}%3c/style%3e%3c/defs%3e%3cg%20transform='translate(-2%20-2)'%3e%3crect%20class='a'%20width='16'%20height='16'%20transform='translate(2%202)'/%3e%3cg%20transform='translate(2%203)'%3e%3cpath%20class='b'%20d='M13.643,31H4.357c-.2,0-.357.224-.357.5s.16.5.357.5h9.286c.2,0,.357-.224.357-.5s-.16-.5-.357-.5'%20transform='translate(-1%20-18)'/%3e%3cpath%20class='c'%20d='M11.583,14.589l4.392-4.409a.415.415,0,0,0-.584-.586L12,13V4.416a.414.414,0,1,0-.828,0V13l-3.39-3.4a.415.415,0,1,0-.584.586Z'%20transform='translate(-3.562%20-3)'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
;}.c{fill:%23dbdbdb;}.d{fill:none;stroke:%23333;stroke-linecap:round;stroke-linejoin:round;}%3c/style%3e%3cclipPath%20id='a'%3e%3crect%20class='a'%20width='22'%20height='22'/%3e%3c/clipPath%3e%3c/defs%3e%3cg%20class='b'%3e%3cg%20transform='translate(1.375%202.251)'%3e%3cpath%20class='c'%20d='M7.563,9.224A20.661,20.661,0,0,1,18.8,8.265l-7.088,7.329-.922-.373-.023-3.312-1.389-.741-2.555.389-3.56,2.989-2,1.7s-.1-4.771,6.3-7.021'%20transform='translate(-0.5%200.249)'/%3e%3cpath%20class='d'%20d='M12.174.745l7.332,7.332a.834.834,0,0,1-.017,1.195L12.157,16.2a.833.833,0,0,1-1.405-.606V12.679a.844.844,0,0,0-.931-.832A11.108,11.108,0,0,0,2,16.74a.834.834,0,0,1-1.5-.576C1.132,9.59,3.786,5.4,9.942,5.066a.841.841,0,0,0,.81-.829v-2.9A.833.833,0,0,1,12.174.745Z'%20transform='translate(-0.5%20-0.5)'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
项目概述
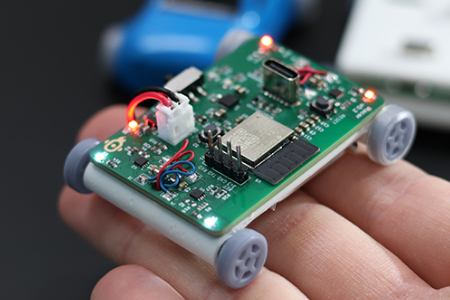
Racer 不仅仅是一个普通的微型遥控小车,它具备“感官能力”。通过板载的霍尔传感器和RGBW颜色传感器,小车可以识别赛道上的特点颜色,并产生相应的物理反馈:
蘑菇(红色):识别后获得瞬间加速。
香蕉皮(黄色):识别后小车会失控打转。
水洼(蓝色):识别后小车会减速。
就和马里奥赛车一样~
硬件参数
主控芯片:采用 ESP32-H2。这是一款支持 IEEE 802.15.4(Zigbee/Thread)和低功耗蓝牙(BLE)的芯片。
传感器:
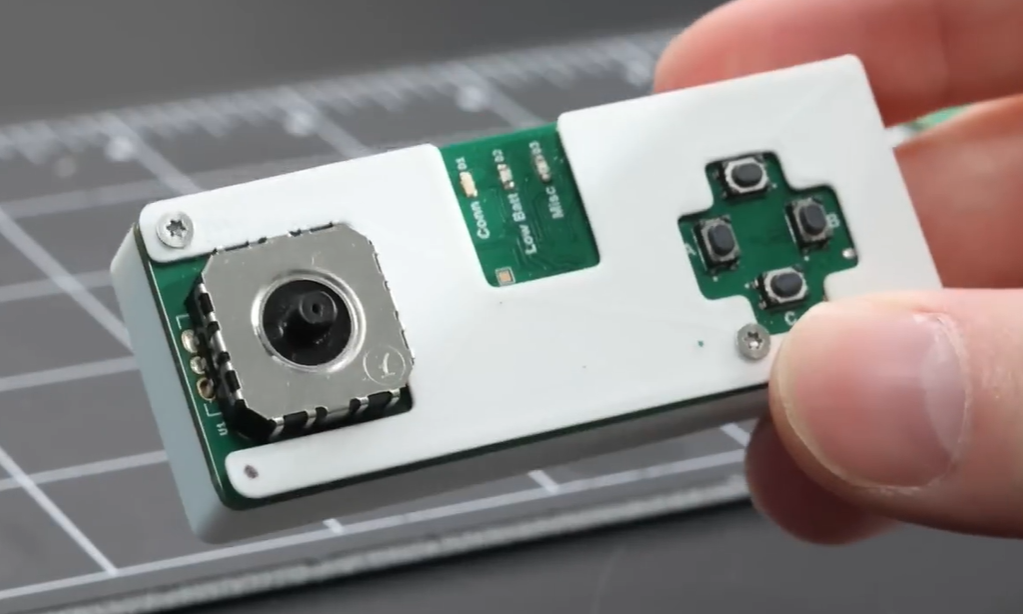
颜色传感器:用于识别赛道上的颜色标识(即各种道具)。
磁性传感器(霍尔元件):用于感应带有磁性的赛道或触发点。
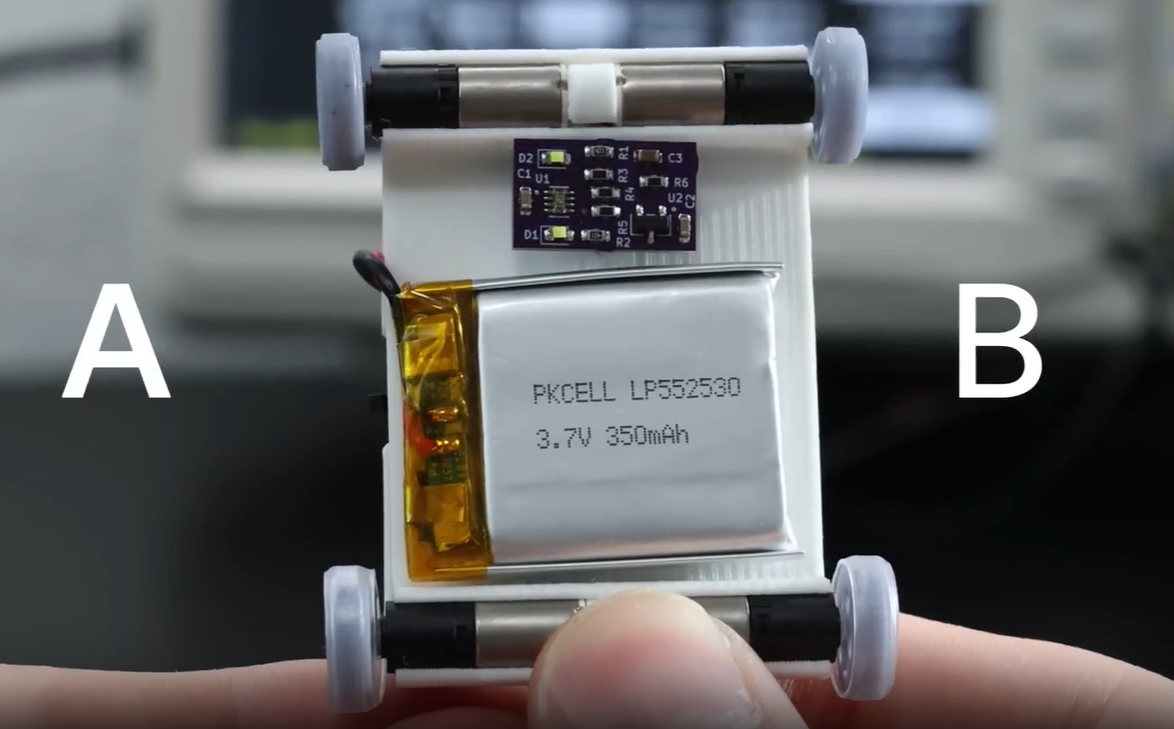
电机驱动:板载 4 路电机驱动,可实现精确的移动控制。
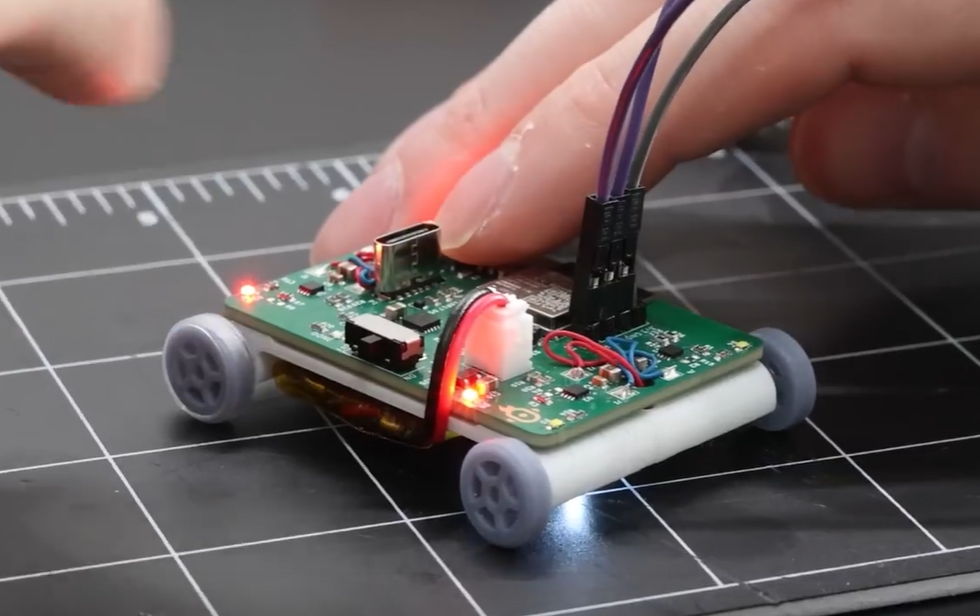
其他配置:配备 RGB LED(前大灯和尾灯,可自定义颜色)、USB-C 充电接口及调试接口。
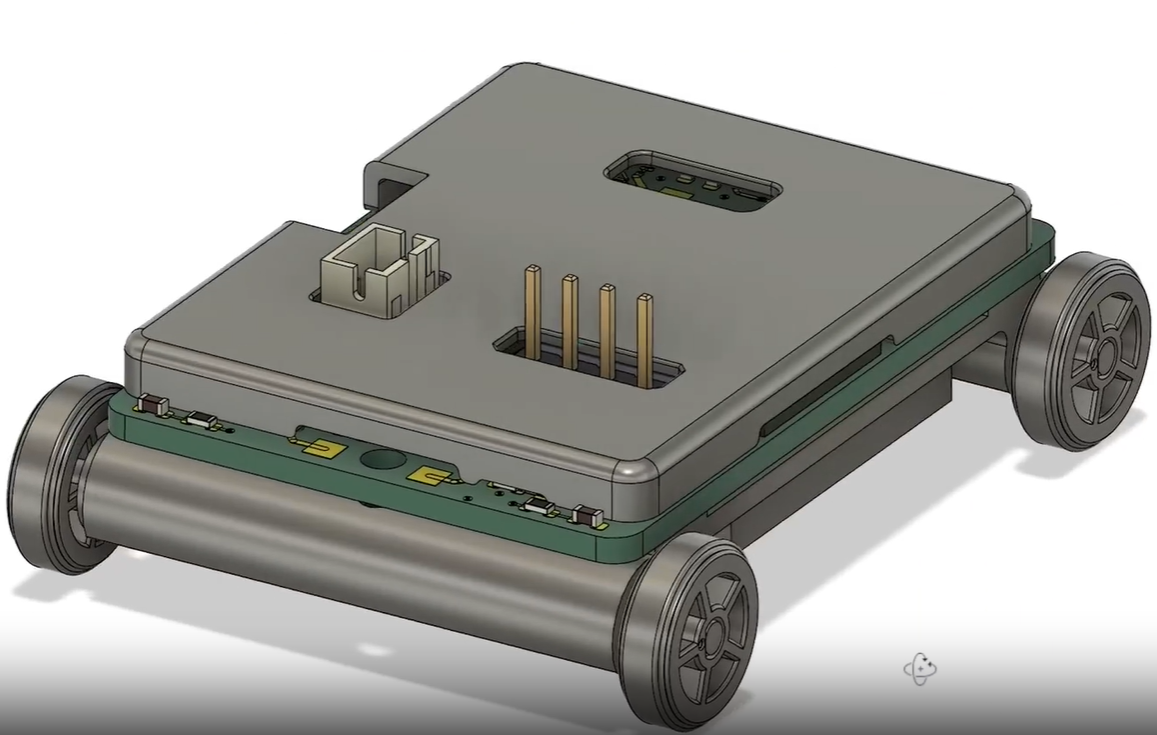
外壳:提供 STEP 格式的 3D 打印文件,轮子部分建议使用 SLA(光固化)打印以保证精度。
软件与算法特色
神经网络识别:该项目最独特的地方在于,它使用 Python 训练了一个简单的神经网络来识别颜色。仓库中包含了训练脚本(
trainer.py),用户可以采集数据并重新训练小车对不同颜色的反应。控制方式:
物理控制器(Thumbtroller):作者还设计了一个配套的开源手柄。
键盘控制:提供 Python 脚本,支持通过电脑键盘(WASD)直接遥控。
移动端:支持通过 iOS 应用控制。
开发环境:基于 ESP-IDF 5.3.1 开发版本。
项目文件说明
Firmware:运行在 ESP32 上的 C 语言代码。
Hardware:包含原理图(PDF)、KiCad 工程文件和 Gerber 生产文件。
Mechanical:外壳和机械结构的 3D 模型文件。
Scripts:用于训练 AI 模型和电脑端远程控制的 Python 脚本。
Lincense
Apache 2.0
;}.c{fill:%23555;}%3c/style%3e%3cclipPath%20id='a'%3e%3crect%20class='a'%20width='18'%20height='18'%20transform='translate(1543%202144)'/%3e%3c/clipPath%3e%3c/defs%3e%3cg%20class='b'%20transform='translate(-1543%20-2144)'%3e%3cpath%20class='c'%20d='M182.144,108.918a.7.7,0,1,1-1.407,0V98.083l-.033.027-.054.05-5.045,5.045a.7.7,0,0,1-1.041-.945l.046-.05,5.045-5.045a2.508,2.508,0,0,1,3.477-.031l.075.072,4.988,5.022a.7.7,0,0,1-.949,1.038l-.05-.046L182.21,98.2l-.066-.061Zm5.394-15.827a.7.7,0,1,1,0,1.407h-12.2a.7.7,0,1,1,0-1.407Z'%20transform='translate(1370.601%202051.909)'/%3e%3c/g%3e%3c/svg%3e "回到顶部")