



'/%3e%3c/svg%3e) 发布
发布 ;}.c{fill:%233f3f3f;}%3c/style%3e%3cclipPath%20id='a'%3e%3crect%20class='a'%20width='24'%20height='24'%20transform='translate(0%20-0.256)'/%3e%3c/clipPath%3e%3c/defs%3e%3cg%20transform='translate(0%200.256)'%3e%3cg%20class='b'%3e%3cpath%20class='c'%20d='M12.938,13.58a.745.745,0,0,1-.328-.076L4.549,9.523a.741.741,0,0,1,0-1.33L12.61,4.212a.74.74,0,0,1,.657,0l8.061,3.981a.741.741,0,0,1,0,1.33L13.267,13.5a.741.741,0,0,1-.329.076M6.553,8.858l6.385,3.153,6.386-3.153L12.938,5.705Z'%20transform='translate(-1.067%20-1.067)'/%3e%3cpath%20class='c'%20d='M12.939,20.964a.729.729,0,0,1-.328-.077l-8.062-3.98a.742.742,0,1,1,.657-1.33l7.733,3.818,7.733-3.818a.742.742,0,1,1,.657,1.33l-8.062,3.98a.729.729,0,0,1-.328.077'%20transform='translate(-1.067%20-3.999)'/%3e%3cpath%20class='c'%20d='M12.939,26.964a.729.729,0,0,1-.328-.077l-8.062-3.98a.742.742,0,1,1,.657-1.33l7.733,3.818,7.733-3.818a.742.742,0,1,1,.657,1.33l-8.062,3.98a.729.729,0,0,1-.328.077'%20transform='translate(-1.067%20-5.547)'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
;}.c{fill:%233f3f3f;}%3c/style%3e%3cclipPath%20id='a'%3e%3crect%20class='a'%20width='24'%20height='24'%20transform='translate(0%200.225)'/%3e%3c/clipPath%3e%3c/defs%3e%3cg%20transform='translate(0%20-0.225)'%3e%3cg%20class='b'%3e%3cpath%20class='c'%20d='M21.648,9.056a.754.754,0,0,0-.215-.535l-5.3-5.3a.752.752,0,0,0-.535-.215V3H7.375A2.377,2.377,0,0,0,5,5.376V20.307a2.377,2.377,0,0,0,2.375,2.376h11.9a2.378,2.378,0,0,0,2.376-2.376V9.056ZM16.355,5.584,19.07,8.3H16.923a.569.569,0,0,1-.568-.568Zm2.924,15.584H7.375a.862.862,0,0,1-.861-.861V5.376a.862.862,0,0,1,.861-.861h7.466V7.731a2.084,2.084,0,0,0,2.082,2.082H20.14V20.307a.863.863,0,0,1-.861.861'%20transform='translate(-1.215%20-0.729)'/%3e%3cpath%20class='c'%20d='M10.757,15.514H15.3A.757.757,0,0,0,15.3,14H10.757a.757.757,0,0,0,0,1.514'%20transform='translate(-2.43%20-3.402)'/%3e%3cpath%20class='c'%20d='M18.327,20h-7.57a.757.757,0,0,0,0,1.514h7.57a.757.757,0,0,0,0-1.514'%20transform='translate(-2.43%20-4.86)'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
;}.b,.c{fill:%233f96f0;stroke:%233f96f0;}.b{stroke-width:0.3px;}.c{stroke-width:0.2px;}%3c/style%3e%3c/defs%3e%3cg%20transform='translate(-2%20-2)'%3e%3crect%20class='a'%20width='16'%20height='16'%20transform='translate(2%202)'/%3e%3cg%20transform='translate(2%203)'%3e%3cpath%20class='b'%20d='M13.643,31H4.357c-.2,0-.357.224-.357.5s.16.5.357.5h9.286c.2,0,.357-.224.357-.5s-.16-.5-.357-.5'%20transform='translate(-1%20-18)'/%3e%3cpath%20class='c'%20d='M11.583,14.589l4.392-4.409a.415.415,0,0,0-.584-.586L12,13V4.416a.414.414,0,1,0-.828,0V13l-3.39-3.4a.415.415,0,1,0-.584.586Z'%20transform='translate(-3.562%20-3)'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
;}.c{fill:%23dbdbdb;}.d{fill:none;stroke:%23333;stroke-linecap:round;stroke-linejoin:round;}%3c/style%3e%3cclipPath%20id='a'%3e%3crect%20class='a'%20width='22'%20height='22'/%3e%3c/clipPath%3e%3c/defs%3e%3cg%20class='b'%3e%3cg%20transform='translate(1.375%202.251)'%3e%3cpath%20class='c'%20d='M7.563,9.224A20.661,20.661,0,0,1,18.8,8.265l-7.088,7.329-.922-.373-.023-3.312-1.389-.741-2.555.389-3.56,2.989-2,1.7s-.1-4.771,6.3-7.021'%20transform='translate(-0.5%200.249)'/%3e%3cpath%20class='d'%20d='M12.174.745l7.332,7.332a.834.834,0,0,1-.017,1.195L12.157,16.2a.833.833,0,0,1-1.405-.606V12.679a.844.844,0,0,0-.931-.832A11.108,11.108,0,0,0,2,16.74a.834.834,0,0,1-1.5-.576C1.132,9.59,3.786,5.4,9.942,5.066a.841.841,0,0,0,.81-.829v-2.9A.833.833,0,0,1,12.174.745Z'%20transform='translate(-0.5%20-0.5)'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
一、核心产品定位
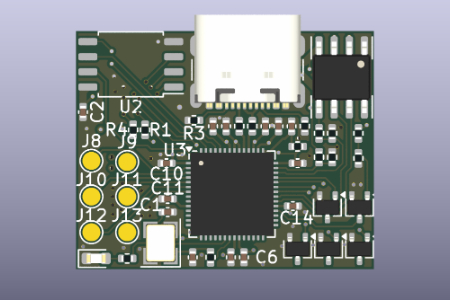
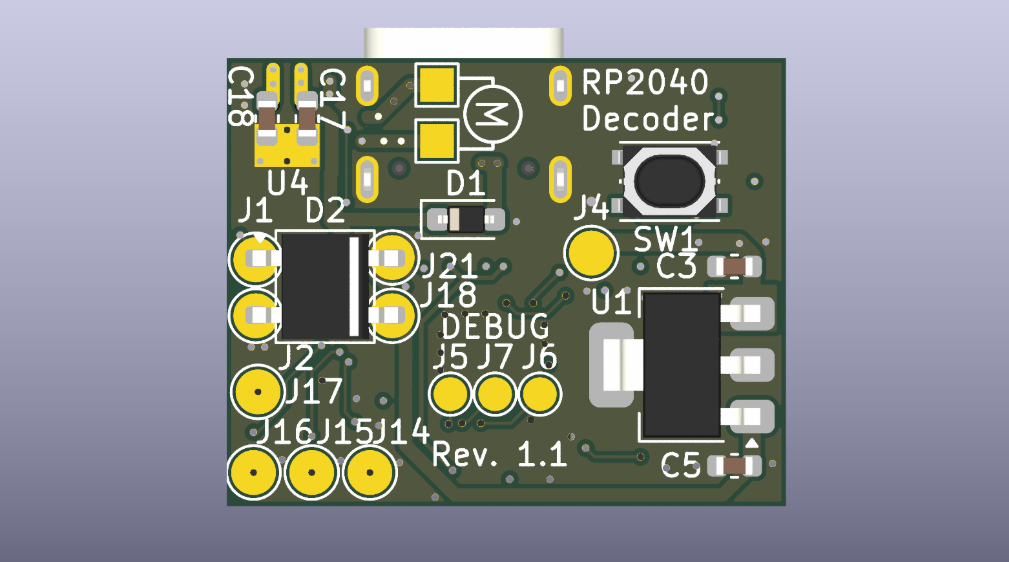
RP2040-Decoder 是一款基于树莓派 RP2040 双核微控制器开发的低成本开源 DCC 解码器,作为商用 DCC 解码器的高性价比替代方案,采用 25x20mm 紧凑板卡尺寸,集成 DCC 协议解码、指令解析与电机控制功能,核心适用于铁路模型机车的 DCC 信号处理与运动控制场景。
二、技术规格
项目 | 参数 |
|---|---|
主控平台 | Raspberry Pi RP2040(双 ARM Cortex-M0 + 核心) |
硬件设计工具 | KiCad |
核心功能 | DCC 信号解码、128 级电机速度控制、CV 配置管理、可编程 I/O 拓展 |
DCC 解码标准 | 兼容 NMRA(S-9.1、S-9.2.x)、RCN(210、212、216)DCC 核心标准 |
电机控制 | 128 速度步级,支持可配置加 / 减速斜坡、v_min/v_mid/v_max 调节;闭环控制 + PID 算法 + 反电动势反馈 |
I/O 配置 | 4 路晶体管开关输出、6 路额外 GPIO,所有 I/O 均支持 PWM 功能 |
板卡尺寸 | 25x20 mm |
存储方式 | 闪存持久化存储 Configuration Variable (CV) 配置参数 |
固件烧录方式 | SWD 烧录(通用);UF2 拖放式烧录 + 串口日志(USB 版本) |
硬件版本 | USB 版本、Legacy 无 USB 版本 |
三、核心功能与状态指示
核心特性
高性能 DCC 解码:基于中断的边沿检测,实现完整的 DCC 数据包 / 协议解码,精准解析铁路模型 DCC 控制指令;
高精度电机控制:搭载离散时间 PID 电机控制器,通过 PWM 关断周期的 ADC 采样实现反电动势反馈,结合增益调度与前馈启动控制器,克服静摩擦,实现变负载下的电机速度稳定;
灵活的 I/O 拓展:多路 PWM 兼容的开关输出与通用 GPIO,支持铁路模型各类外设的拓展控制,满足个性化 DIY 需求;
完善的 CV 配置:支持功能映射与编程轨道(服务模式),可灵活配置设备参数,适配不同模型控制需求;
双核任务分工:Core 0 负责信号处理与配置管理,Core 1 专注运动控制,双核独立工作提升设备运行效率;
双硬件版本可选:USB 版本兼顾易用性,Legacy 版本适配极简装配场景,满足不同用户的硬件使用需求;
标准化文档支持:集成 GitHub Pages 全量文档,覆盖硬件原理与软件实现,降低开发与使用门槛;
开源可复刻:提供完整的硬件设计与软件源码,支持二次开发、硬件复刻与功能定制。
状态指示
暂未提及硬件状态指示灯相关设计与功能说明。
四、核心操作指南
硬件版本选择
USB 版本:优化易用性,推荐新手 / 快速部署场景使用,支持 UF2 拖放式固件烧录,可通过串口实现日志查看与调试;
Legacy 版本:无 USB 接口,采用单面装配设计,适配轻量化 / 嵌入式场景,仅支持 SWD 方式进行固件烧录。
CV 配置与服务模式操作
设备支持 NMRA/RCN 标准的编程轨道(服务模式)逻辑,可通过编程轨道完成 CV 参数的读写与配置;
支持自定义功能映射,可根据铁路模型的控制需求,将 DCC 指令与设备 I/O、电机控制功能进行关联配置;
CV 配置参数通过闪存持久化存储,掉电后不会丢失,无需重复配置。
电机控制参数配置
可灵活设置电机 128 速度步级的加 / 减速斜坡曲线,适配不同模型机车的运动特性;
支持 v_min/v_mid/v_max 速度阈值调节,精准控制电机启停与运行速度区间;
闭环控制功能默认启用,可根据负载情况适配 PID 控制器参数,保证变负载下的速度稳定。
五、安装与连接要点
硬件装配:USB 版本为常规双面装配,Legacy 版本为单面装配,复刻硬件时需严格遵循项目 KiCad 设计文件的器件选型与焊接规范;
模型机车连接:将板卡接入铁路模型机车的 DCC 信号接收端与电机控制端,确保接线接触良好,避免短路导致设备损坏;
拓展 I/O 连接:外部外设接入 GPIO / 晶体管开关输出时,需匹配器件的额定电气参数,避免过流、过压损坏设备;
烧录前检查:烧录固件前确认硬件版本与固件包匹配,USB 版本需保证 USB 接口连接正常,Legacy 版本需完成 SWD 调试接口的接线;
开源硬件复刻:复刻硬件时需遵循对应开源协议,保留项目源码与版本标识,板卡可直接在 KiCad 中打开编辑设计文件。
六、固件开发(How to build the firmware)
项目提供完整的软件源码与 CI 流水线构建的预编译固件,支持基于 RP2040 平台的二次开发与固件定制,核心步骤:
搭建 RP2040 嵌入式开发环境,导入项目
Software文件夹下的源码,适配双核 ARM Cortex-M0 + 的开发与编译规范;根据功能需求修改固件,如调整 DCC 解码参数、优化 PID 电机控制算法、新增 I/O 功能映射、定制 CV 配置项等;
编译固件源码,生成可烧录的二进制文件,或直接使用项目 CI 流水线在每次版本发布时构建的现成可烧录固件;
选择对应烧录方式:通用 SWD 烧录(适配所有版本);USB 版本可直接通过文件管理器将 UF2 格式固件拖放至设备,完成一键烧录;
烧录完成后重启设备,设备将默认加载 DCC 解码与电机控制功能,可通过编程轨道完成 CV 参数的个性化配置。
七、故障排查(Troubleshooting)
项目暂未提供官方明确的故障排查专项方案,若使用过程中出现问题,可参考以下解决方向:
DCC 信号解码异常:检查 DCC 信号接线是否正常,确认设备兼容当前使用的 NMRA/RCN DCC 标准,核对 CV 配置参数是否匹配信号解析需求;
电机控制失灵 / 速度不稳:检查电机与板卡的连接是否松动,重新校准 PID 控制器参数与速度阈值(v_min/v_mid/v_max),确认模型机车负载是否超出设备控制范围;
固件烧录失败:确认硬件版本与固件包匹配,USB 版本检查 USB 连接与驱动是否正常,Legacy 版本核对 SWD 调试接口接线与烧录工具配置;
I/O 拓展无输出:检查外设接线与电气参数匹配性,确认 PWM/GPIO 功能映射的 CV 配置是否正确,排查外设本身故障;
更多问题支持:可查看项目 GitHub 仓库的 Issues 板块与更新文档,或参与开源社区讨论获取解决方案。
License
CERN Open Hardware Licence
;}.c{fill:%23555;}%3c/style%3e%3cclipPath%20id='a'%3e%3crect%20class='a'%20width='18'%20height='18'%20transform='translate(1543%202144)'/%3e%3c/clipPath%3e%3c/defs%3e%3cg%20class='b'%20transform='translate(-1543%20-2144)'%3e%3cpath%20class='c'%20d='M182.144,108.918a.7.7,0,1,1-1.407,0V98.083l-.033.027-.054.05-5.045,5.045a.7.7,0,0,1-1.041-.945l.046-.05,5.045-5.045a2.508,2.508,0,0,1,3.477-.031l.075.072,4.988,5.022a.7.7,0,0,1-.949,1.038l-.05-.046L182.21,98.2l-.066-.061Zm5.394-15.827a.7.7,0,1,1,0,1.407h-12.2a.7.7,0,1,1,0-1.407Z'%20transform='translate(1370.601%202051.909)'/%3e%3c/g%3e%3c/svg%3e "回到顶部")